Цена:
586.77
Просмотров:
753
Число заказов:
16
Основные параметры товара
Язык:
Польский, Немецкий, Итальянский, Русский, Португальский, Норвежский, Испанский, Французский, Турецкий, Английский
Angular Velocity Output:
Yes
Для возрастной группы:
Взрослые
Совместимость:
Полная совместимость
Назначение:
Acceleraiton Angle Gyroscope Angular Velocity Output
Тип:
Assembling
Acceleration Output:
Yes
Angle Output:
Yes
Gyroscope Output:
Yes
Stiff Little Fingers - Nobody's Heroes

Категория: Виниловые пластинки
Стиль: Punk
Год: 1980
Страна: Canada
Жанры: Rock
Стиль: Punk
Год: 1980
Страна: Canada
Жанры: Rock
Скрябін - Балади

Категория: Виниловые пластинки
Стиль: Pop Rock
Год: 2017
Страна: Russia
Жанры: Rock
Стиль: Pop Rock
Год: 2017
Страна: Russia
Жанры: Rock
Сведения о товаре
Помочь
Если вам нужно руководство пользователя, программное обеспечение ПК, приложение, Образец Кода посылка AD,
Пожалуйста, введите сайт: https://wiki.wit-motion.com/english/doku.php?id=module
Подробные видео, пожалуйста, найдите «witmotion» на YouTube
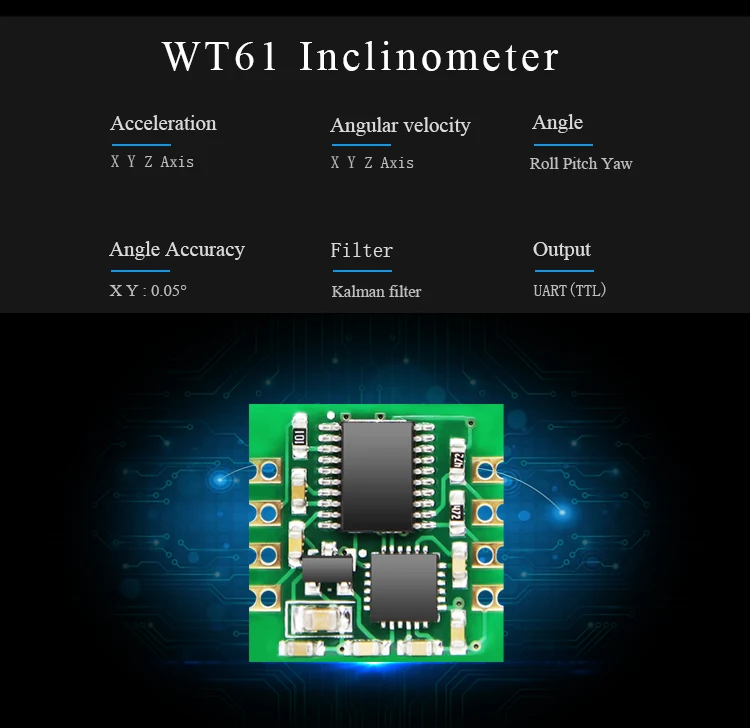
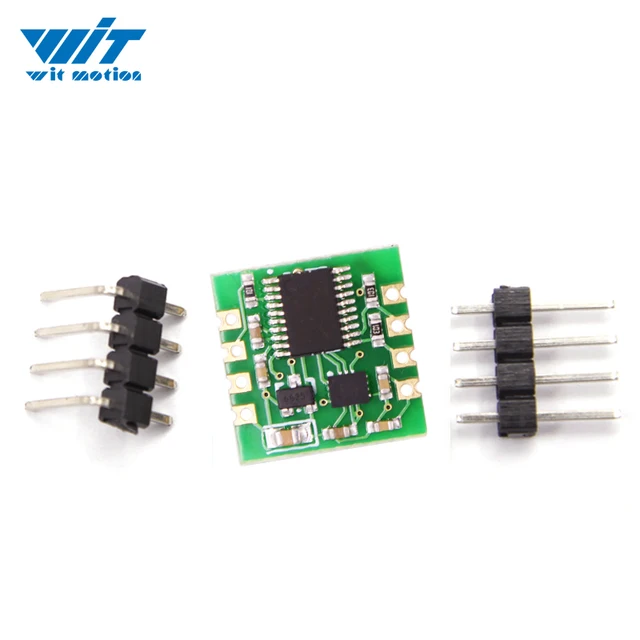
(1) WT61 гироскоп хорошее решение для угол измерения, измерения ускорения и Остроугольные измерения скорости, это пакеты 3 оси гироскопа и 3 оси акселерометр.
(2) фильтр Kalman сочетает в себе гироскоп и акселерометр, чтобы получить высокоточное измерение угла, его можно использовать, например, четырехосевой контроль полета и самобалансирующий робот,Измерение угла и глубины и так далее.
(3) модуль может получить точное отношение в динамической среде. Точность измерения отношения составляет 0,05 градусов, высокая стабильность.
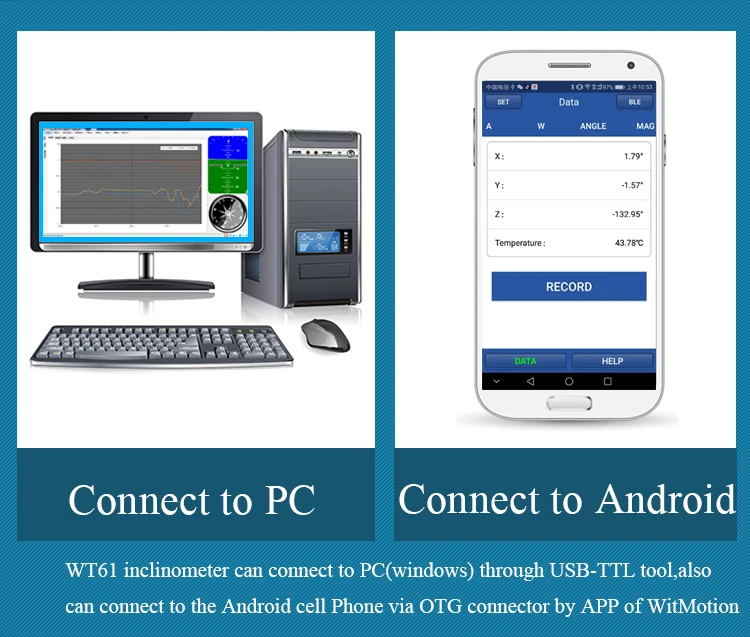
(4) с использованием высокоточной гироскоп акселерометр MPU6050, читать данные измерений на последовательный порт, нет необходимости изучать комплекс I2C протокола MPU6050.Держать I2C интерфейс MPU6050 для удовлетворения потребностей продвинутых пользователей. С передовой цифровой технологии фильтрации, уменьшить измерения шума и улучшить точность измерений.
(5) использование штампов отверстий золотое покрытие, гарантия качества, может быть встроено в технический индикатор печатной платы пользователя
Основной Особенности:
1 Вход напряжение: 3,3 В-5 В
2 Потребляемый ток: Типичный 10 мА
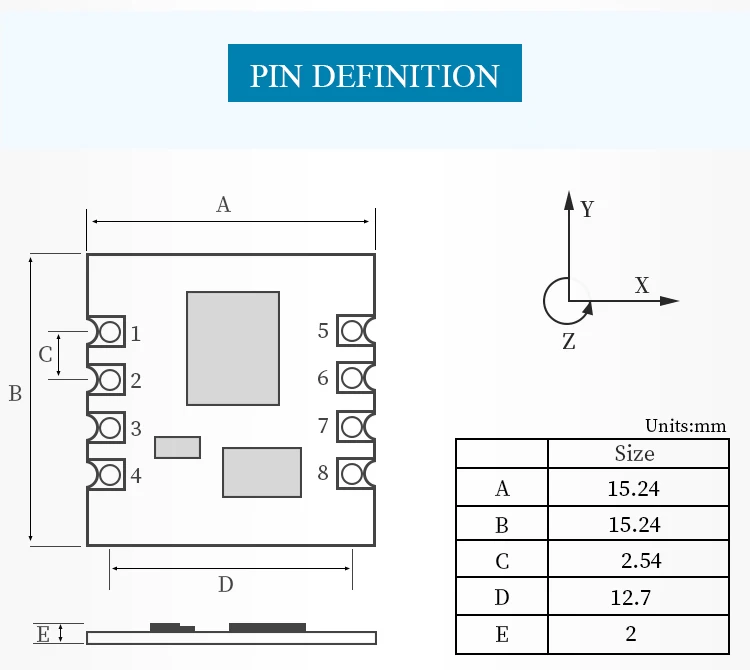
3 Объем: 15,24 мм X 15,24 мм X 2 мм
4 измерения: угол наклона: 3 оси ускорение: 3 оси угловая скорость: 3 оси
5 Диапазон: ускорение: ± 16 г, угловая скорость: ± 2000 °/С.
6 Выходная частота данных 100 Гц (скорость передачи данных 115200)/20 Гц (9600 бод).
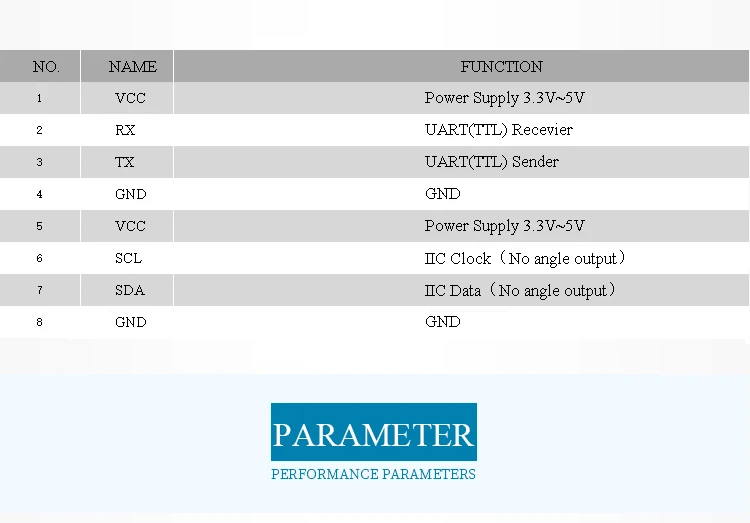
7 данных Интерфейс: последовательный (ttl уровень), I2C (подсоединенный напрямую MPU6050, никакого отношения выход).
8 бод скорость 115200kps/9600kps.
9 предоставьте одночиповый аналитический Образец Кода.
Примечание: Угол оси Z будет иметь накопленную ошибку, потому что нет коррекции магнитного поля
(2) фильтр Kalman сочетает в себе гироскоп и акселерометр, чтобы получить высокоточное измерение угла, его можно использовать, например, четырехосевой контроль полета и самобалансирующий робот,Измерение угла и глубины и так далее.
(3) модуль может получить точное отношение в динамической среде. Точность измерения отношения составляет 0,05 градусов, высокая стабильность.
(4) с использованием высокоточной гироскоп акселерометр MPU6050, читать данные измерений на последовательный порт, нет необходимости изучать комплекс I2C протокола MPU6050.Держать I2C интерфейс MPU6050 для удовлетворения потребностей продвинутых пользователей. С передовой цифровой технологии фильтрации, уменьшить измерения шума и улучшить точность измерений.
(5) использование штампов отверстий золотое покрытие, гарантия качества, может быть встроено в технический индикатор печатной платы пользователя
Основной Особенности:
1 Вход напряжение: 3,3 В-5 В
2 Потребляемый ток: Типичный 10 мА
3 Объем: 15,24 мм X 15,24 мм X 2 мм
4 измерения: угол наклона: 3 оси ускорение: 3 оси угловая скорость: 3 оси
5 Диапазон: ускорение: ± 16 г, угловая скорость: ± 2000 °/С.
6 Выходная частота данных 100 Гц (скорость передачи данных 115200)/20 Гц (9600 бод).
7 данных Интерфейс: последовательный (ttl уровень), I2C (подсоединенный напрямую MPU6050, никакого отношения выход).
8 бод скорость 115200kps/9600kps.
9 предоставьте одночиповый аналитический Образец Кода.
Примечание: Угол оси Z будет иметь накопленную ошибку, потому что нет коррекции магнитного поля